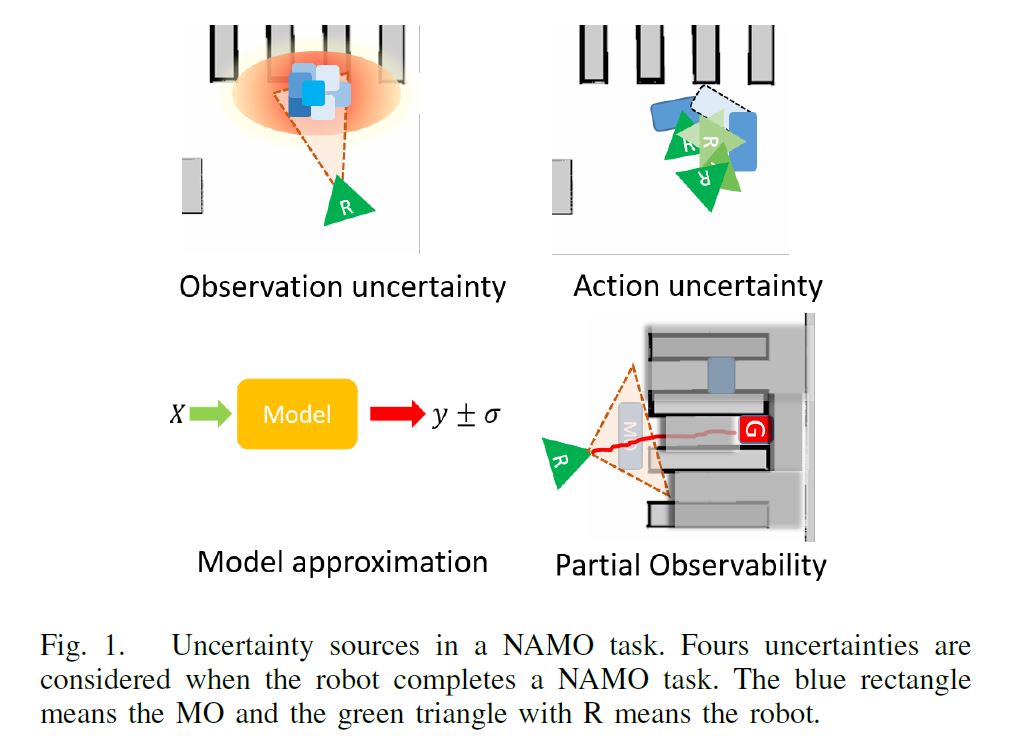
Uncertainty types
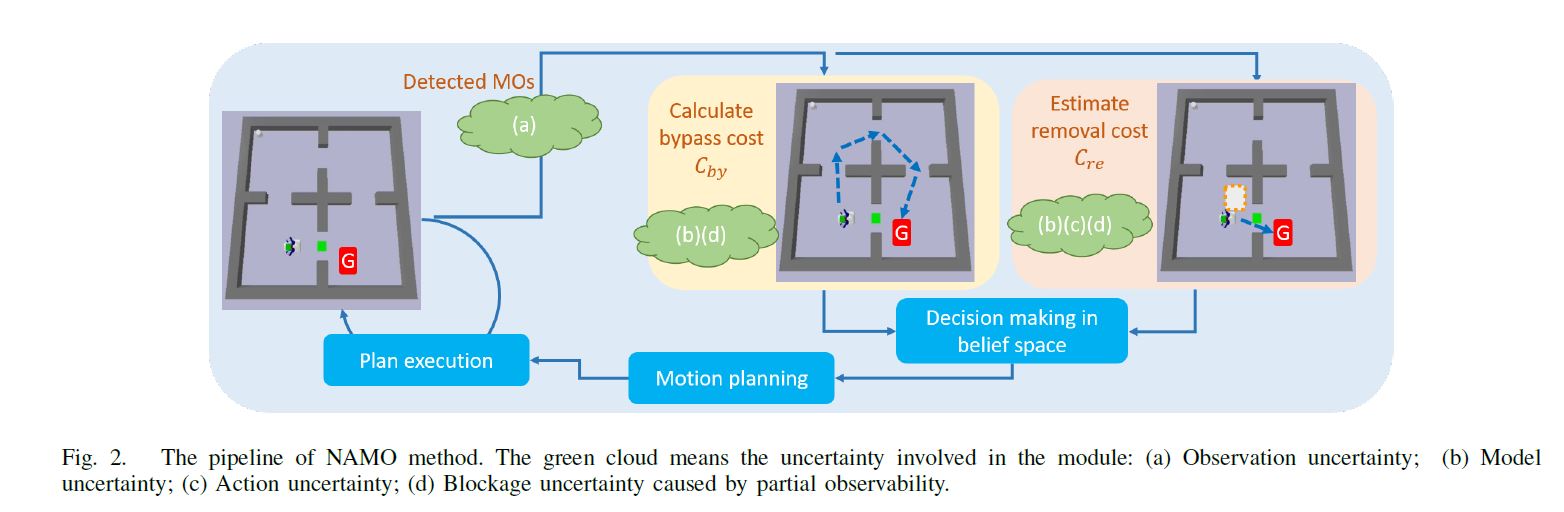
Method overview
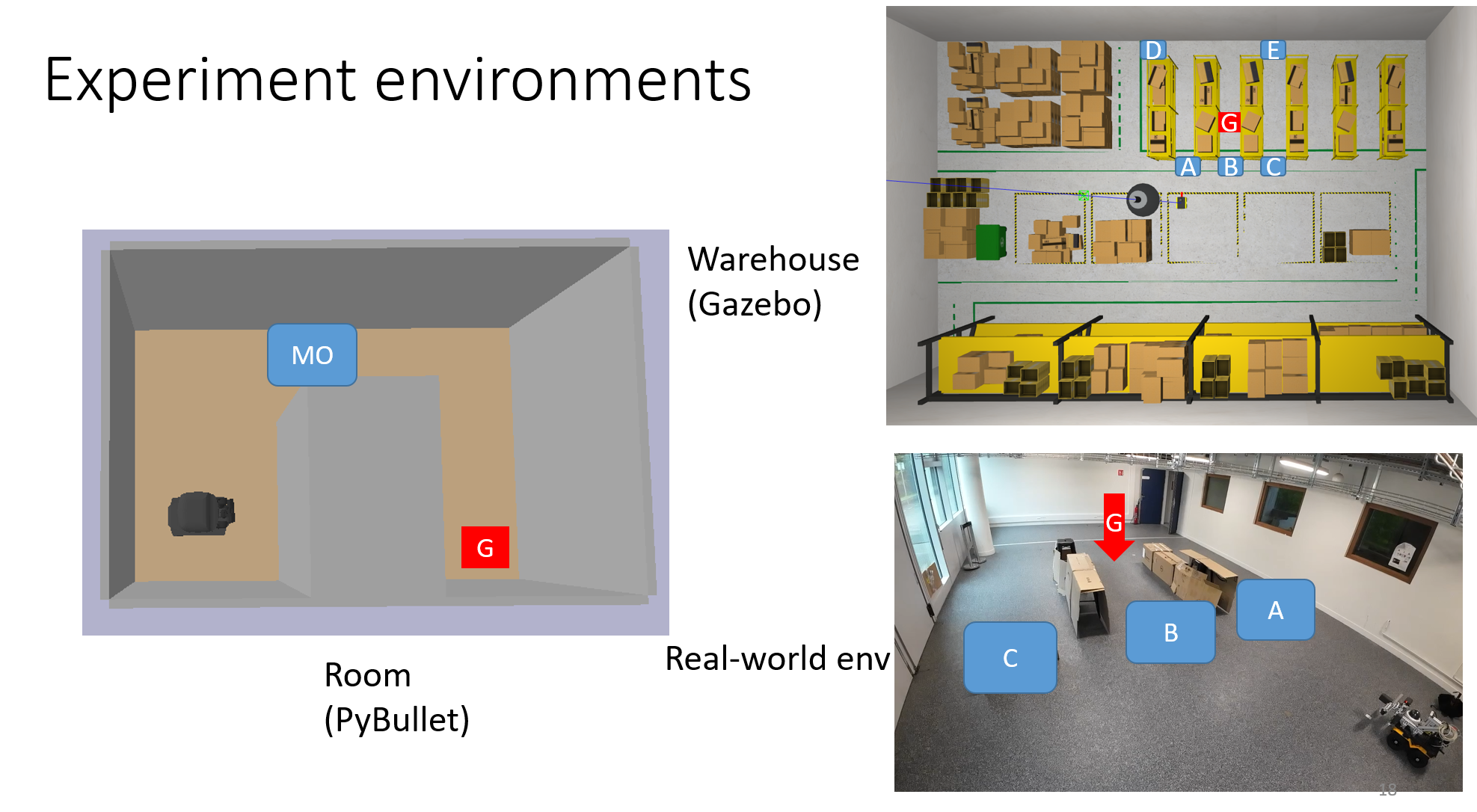
Navigation among Movable Obstacles (NAMO) remains a fundamental yet challenging problem in real-world robotics, where sensor noise, imperfect models, actuation errors, and limited observability introduce significant uncertainty. Conventional approaches often neglect these factors or assume near-ideal conditions, resulting in brittle plans that compromise safety or efficiency. To address this gap, we propose NAMOUnc, a novel uncertainty-aware NAMO framework that explicitly quantifies four key uncertainty sources: perceptual, model-based, action-related, and blockage risk from occluded regions, and incorporates them into a unified decision-making process. By representing navigation costs as time intervals and jointly optimizing both success likelihood and execution time, NAMOUnc enables adaptive, risk-sensitive choices between obstacle removal and detour strategies. We evaluate our approach in diverse simulated environments and on a physical mobile manipulator, demonstrating consistent improvements in robustness and task completion efficiency compared to state-of-the-art baselines.
BibTex Code Here